鱼、昆虫只有简单的脑,黏菌甚至根本没有脑。但与人类相比,这些生物的动作性能却非常高。通过解析其中的根本原理,可以实现前所谓有巧妙控制。
“传统仿生的着眼点大多是生物的‘物’(结构)。而今后,研究生物的动作及其原理,也就是‘事’将变得更加重要”。
控制技术专家、大阪大学研究生院工学研究科机械工学专业教授大须贺公一这样强调。大须贺是“仿事”的提倡者,也就是从控制的角度出发,通过分析生物的动作和活动等,解明并利用生物的控制结构。按照这一理论的思路,通过深入探索本质,可以获得“放之生物而皆准”的知识。
大须贺指出,东北大学电气通信研究所教授石黑章夫的研究成果就是仿生技术的一个好例子。石黑发现生物具备的自主分布式控制的原理,并将其应用于四足行走机器人,使机器人实现了像马一样自然的行走。
过去的行走机器人大多采取的是依赖高性能中央运算装置的“中央集权式强压控制方法”(石黑),而另一方面,就算是没有脑的原始生物,也能在移动的过程中,应对无法预测的环境变化。也就是说,即使没有高性能的中央运算装置,也有可能实现像生物一样灵活的动作。这是因为生物的运动采用的是自主分布式控制方法,分散配置的每个单元都会自发性地相互协调。实际上,在某些昆虫的体内,存在着名为“扩散神经”的分散式神经网络。
研究真黏菌的动作
在研究生物的自主分布式控制方式的时候,石黑把目光对准了结构和动作单一的“真黏菌”(图1)。这是“变形菌”的一种,没有脑和神经。即便如此,这种菌依然会像动物一样到处寻找食物。真黏菌由溶胶状的“内质(原生质)”与凝胶状的“外质”组成。在移动时,真黏菌是通过外质各个部分的收缩、舒张,使内质发生流动,从而带动身体运动。
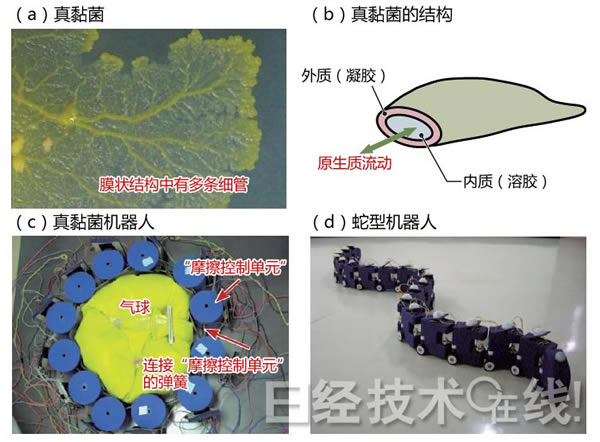
图1:试制模拟真黏菌的机器人
东北大学试制了真黏菌型机器人(a)。真黏菌由溶胶状的“内质”和凝胶状的“外质”组成(b)。装满水的气球充当内质,配置在气球周围的多个“摩擦控制单元”通过弹簧连接成环状,作为外质(c)。真黏菌的自律控制规则运用于蛇型机器人,成功对其进行了驱动(d)。(图:《日经电子》根据东北大学的资料制作)
石黑为了探索真黏菌的自主分布式控制方法,试制出了模仿真黏菌的机器人。用装满水的气球代替内质部分。外质采用的则是用弹簧连接多个机械单元(摩擦控制单元)组成的环状体。
弹簧既能被动也能主动运动。这款机器人的原理,是在调整弹簧的长度和摩擦控制单元与地面之间的摩擦系数的同时,通过挤压、拉伸内部的气球,使整体实现移动。
石黑为这台机器人采用自己推测出的自主分布式控制规则,在驱动机器人运动后,再根据结果修改自主分布式控制规则,重新在机器人身上进行尝试。经过不断摸索,终于得到了动作与实际真黏菌一致的自主分布式控制规则。其重点是在弹簧伸缩的时候,增加调整伸缩时间(相位)的项目,以防止弹簧承受超出其能力范围的力。在这一项目中,要以“差距函数”减少为前提,调整伸缩的时机。差距函数以公式的形式,表现出了控制系统与机构系统、周围环境之间产生的“差距”。
具有普遍性的差距函数
石黑发现,通过真黏菌得到的自主分布式控制规则有不少地方与很多生物相通。实际上,在为蛇型机器人直接采用这种自主分布式控制规则后,与石黑开发的老式蛇型机器人相比,其动作更接近于真蛇。当然,蛇的结构比真黏菌复杂得多,要想实现更接近蛇的动作,还需要研究出专用的自主分布式控制规则。
不过,“基于差距函数的设计方案可以运用于其他生物的自主分布式控制规则”(石黑)。根据这一思路,石黑成功试制出了四足行走机器人(图2)。并且通过这台机器人,得到了能够像马、猫等四足行走的动物一样运动的自主分布式控制规则。这种控制规则“适用于马、骆驼、猫等所有四足行走的生物”(石黑)。四足行走生物实际的行走方式存在许多差异,例如四肢中只有一条离地的“正常步”,右前腿和左后腿对角线同时落地、离地的“斜对步”等。这是“因为每种动物的重心不同”(石黑)。实际上,在四足行走的自主分布式控制规则中加入不同动物的重心信息后,行走方式也会随之改变。使猫像猫,马像马,骆驼像骆驼那样行走。
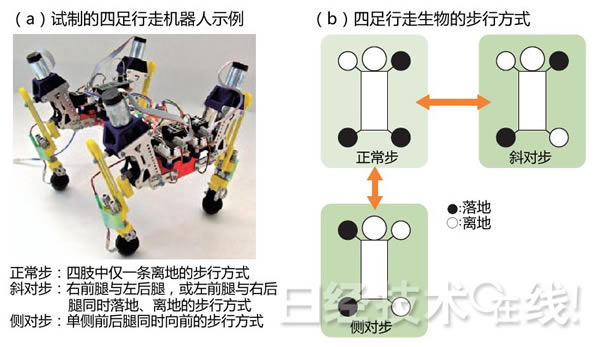
图2:流畅的四足行走成为现实
东北大学为试制的多种四足行走机器人采用了真黏菌的自律控制规则(a)。在实验过程中,又发现了能够实现“正常步”、“斜对步”、“侧对步”等四足行走的公式(b)。(图:《日经电子》根据东北大学的资料制作)
而且,试制的四足行走机器人可以从静止状态马上进入行走状态。一条腿发生故障时,其他腿会采取相应的动作,消除故障的影响。
今后,石黑还将把范围扩大到双足行走机器人、海星型机器人等众多机器人,继续致力于研究不同生物的自主分布式控制规则。
源自鱼类的防撞汽车
在生物之中,有一些生物虽然成群结队,但在移动的时候,既能躲避障碍物,又能彼此之间不发生碰撞。如今,日产汽车正准备把这种生物的动作运用于自动驾驶领域。
该公司模仿鱼群的动作,开发出了能够避免撞击周围的机器人和障碍物的机器人车“EPORO”(图3)。鱼类会根据与最近的伙伴和障碍物的距离,通过三种规则改变动作。这三种规则分别是在距离伙伴太远时拉近距离的“接近”,与伙伴保持适当距离并配合其速度和前进方向的“并行”,以及在距离过近时改变前进方向,防止与伙伴相撞的“冲撞回避”。

图3:结合鱼群的活动,实现“不撞的机器人”
日产汽车结合鱼群的活动,开发出了能够避免与周围的机器人和障碍物碰撞的机器人车“EPORO”。检测周围机器人的距离和方向使用两种传感器。分别是使用红外激光的测距传感器和UWB通信模块。EPORO利用UWB通信模块与周围的机器人进行通信,根据通信耗费的时间推测距离。
研究表明,鱼类是利用能够敏感察觉近处物体的侧线感觉、能够望远的视觉两种感觉器官来完成上述控制。为此,日产汽车使用红外激光的测距传感器替代侧线感觉,使用UWB(ultrawide band)通信模块替代了视觉。利用UWB通信模块与周围的机器人进行通信,根据通信所需的时间推测距离。
通过在能够并行多台的宽敞道路和只能容许一台通过的狭窄道路上进行测试,结果表明,EPORO在宽敞的道路上分散前进,而在狭窄的道路上则排成了一列,与鱼群的动作如出一辙(图4)。而且,当前方出现障碍物的时候,EPORO也通过团队协作,顺利避开了障碍物。

图4:行驶状态根据情况改变
日产汽车的机器人车“EPORO”能够根据情况改变集体行驶的状态。举例来说,在宽敞的道路上,EPORO保持安全间隔,分散行驶,而在狭窄的道路上,EPORO则排成1列行驶。前方出现障碍物的时候,还会改变行驶的队形,避开障碍物。
利用测距性能的误差模仿生物的特点
有意思的是,因为UWB通信模块测距性能参差不齐,每一台EPORO都表现出了自己的“个性”。比方说,保持一排队形的时候,EPORO并不是等间距,而是前后左右略有错开,表现出了具有生物特色的动作。
通过反复进行模拟和实验,对参数进行调整,EPORO做到了在维持群体的同时,顺利避开障碍物。在没有结合生物算法的时候,“冲撞回避”和“群体前进”很难实现兼顾。如果为了维护个体的安全,在回避时采取较大幅度的动作,就会脱离群体。如果为了维持群体前进,紧跟着伙伴不放,就难以避开障碍物。而这一次,上述问题全部得到了解决。
人工制造昆虫脑
通过模仿昆虫脑控制机器人——东京大学尖端科学技术研究中心副所长、生命智能系统领域教授神崎亮平率领的研究组正在开展这项研究。
与人等哺乳类动物相比,昆虫的脑极其简单。有研究表明,组成人脑的神经细胞有1011个,而昆虫只有105~106个左右。尽管如此,昆虫依然具备巧妙躲开障碍物,在危险前面隐蔽自己的能力。而且,对于危险的反应速度比人还要快。在存在外部干扰的情况下,还能对干扰进行修正。也就是说,“只要能够人工制造出昆虫的脑,就可以制造出前所未有的节能、机敏的高性能机器人”(神崎)。
为了了解昆虫的脑,神崎研究组研究的对象,是家蚕蛾对特定的气味物质(信息素)做出反应并向其移动的神经网络。
通过神经的可视化制造人工脑
研究大致分为两个方向。一是解明昆虫脑的回路结构,制造出人工脑,使用人工脑驱动机器人。二是直接使用昆虫脑驱动机器人。研究组希望通过二者的比较研究,对人工脑进行修正和拓展,从而提高人工脑的精度(图5)。
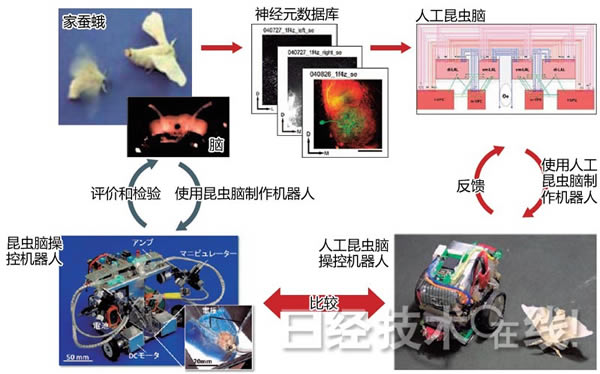
图5:对昆虫脑实施IC化
通过解明家蚕蛾朝信息素发生源的方向移动的脑结构,制造人工脑,用来驱动机器人。(图:《日经电子》根据东京大学的资料制作)
人工脑的制作方式如下。首先,向昆虫脑的神经细胞中插入含有荧光色素的玻璃管电极,通入微弱电流,对细胞进行荧光染色,利用共焦激光扫描显微镜观察,测量每个神经细胞的三维结构。然后,根据三维结构,利用单个的神经细胞构建神经回路(网络),明确家蚕蛾脑神经回路的概要。
为了揭示把气味物质检测转化为运动的神经网络,研究组还特别调查了昆虫脑在检测信息素时把信息传送到运动系统的方式。结果发现,运动系统接收到了与触发器电路相同的信号(图6)。而通过对生成信号的神经细胞顺藤摸瓜,与信息素检测到运动全过程相关的神经网络也水落石出。
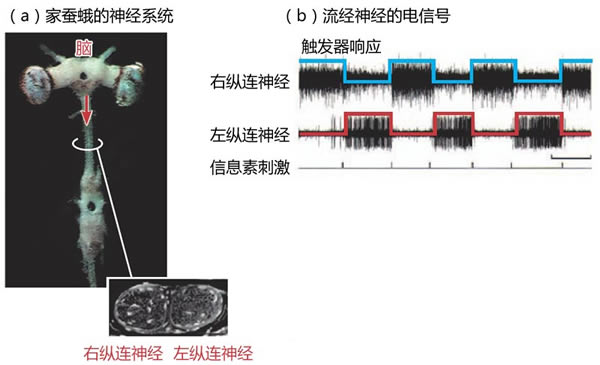
图6:家蚕蛾的运动系统是触发器响应
在制作使用昆虫脑驱动的机器人的过程中,研究组发现了左右的动作是通过触发器响应的方式传送。动作通过信号的长短表现。(图:《日经电子》根据东京大学的资料制作)
而且,研究组还利用程序模仿检测气味物质并激发动作的神经网络,制成了人工脑。
在超级计算机上重现昆虫脑
直接使用昆虫脑控制的机器人分为两种。一种是家蚕蛾利用自己的腿控制的机器人“昆虫操控机器人”,一种是取下家蚕蛾的头部,只利用脑的“昆虫脑操控机器人”。
昆虫操控机器人是把家蚕蛾放置到可以自由旋转、类似于乒乓球的球体上,利用家蚕蛾进行控制。当家蚕蛾活动腿脚,向目标方向前进的时候,球会随之运动,此时,传感器将检测到动作。根据信号,机器人会做出相应的动作。昆虫脑操控机器人则是取下家蚕蛾的头部,通过检测传导至运动系统的触发器信号,利用这种神经信号驱动机器人。
通过研究利用昆虫脑的机器人,研究组发现,即使让致动器的动作比家蚕蛾的脑做出反应延时约600ms,或是沿左右方向做不对称动作,家蚕蛾的脑也能对这些外部干扰进行纠正。
神崎研究组认为,通过对比使用人工脑和昆虫脑的机器人,不断进行改进,能够制造出抗干扰能力强的机器人。现在,利用超级计算机“京”重现家蚕蛾更详细的神经回路,实施模拟其功能的研究也在进行之中。如果这项研究取得成功,人们将有可能对基于脑设计图的神经回路功能进行检验和预测,制造出更接近昆虫脑的人工脑。
考察蟋蟀的回避能力
神崎也与日产汽车开展了合作研究。研究的内容是具备蜂类和蟋蟀的回避能力的机器人。
其中,日产汽车对蟋蟀的回避能力寄予了强烈关注。因为当接近的移动体和障碍物不止一个时,蟋蟀能够为其排定优先顺序,有效进行回避。与之相比,EPORO只能避开近处的障碍物,没有像蟋蟀那样排序。
神崎表示,在为机器人赋予蟋蟀的回避能力后,机器人在模拟中,依次避开了16个移动体。实际试制的机器人也成功避开了多个移动体。(未完待续,记者:根津祯、中道理)