

1939年,一名俄罗斯工程师提出了“飞行潜艇”的概念,能从空中到水下实现无缝过渡,但几十年来,鲜有成功的设计先例。美国哈佛大学官方网站最近称,该校微型机器人实验室将飞行潜艇的设计向前推进了一步,他们设计的飞行蜜蜂,也就是“昆虫机器人”,既能在空中飞,也能在水中游。
设计飞行潜艇面临着“相互冲突”的挑战,飞行器需要较大机翼提供升力,而水下航行器需要减少表面积来降低阻力。哈佛大学的工程师们从角嘴海雀身上找到设计的灵感,这种华丽的喙鸟是自然界最牛的“混合动力车”,能自由地往返于空中和水下。
在德国举行的智能机器人和系统国际会议上,哈佛大学微型机器人实验室陈凯文为第一作者的相关论文被评为最佳学生论文奖。通过各种理论、计算和实验研究,陈凯文的团队发现,角嘴海雀在空气中和水中的扑翼动力学机制非常相似,两种情况下,翅膀都是前后摆动,唯一的区别是摆动速度。
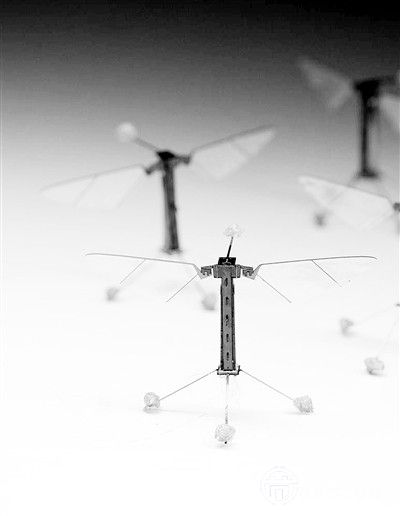
研究团队因此设计出首个既能飞翔又能游泳的机器蜜蜂,它比曲别针还小一些,其微型翅膀的煽动频率可高达每秒120次。但它如此之小,分量如此之轻,根本没办法打破水面张力。为了克服这个障碍,机器蜜蜂会以某个角度悬停在水面,暂时关掉引擎,然后沉入水里下潜。
水的密度是机器蜜蜂面临的第二重障碍。论文第二作者法瑞尔·赫尔博灵解释说,水的密度是空气的1000倍,若机器蜜蜂翅膀煽动的频率不加调整,则很容易被毁掉。为此,研究团队将这个频率从每秒120次降至每秒9次,但同时保持了煽动的动力机制以及相同的铰链设计。
虽然这些设计保证了机器蜜蜂从空中到水下的无缝过渡,但反过来还不行,因为从水中出来时,还不能产生足够的升力,而这正是研究团队下一步要攻克的难点。
陈凯文表示,对扑翼运动的分析并不只局限于昆虫大小的微型飞行器,这个理论有潜力用来设计出更大的仿生机器人。







