在电动车中,蓄电池和电驱动系统是两个关键,它们的技术水平很大程度上决定着电动车的主要性能。不同于一般工业和家用电驱动系统,在电动车上,不论是采用何种方式供给电能,能量都是有限的,因此为满足电动车的特殊性,新型的电驱动系统中的电机和功率变换装置应满足以下一些基本要求:①高效率;②体积小重量轻;③高起动转矩倍数;④良好的调速性能和可控制性;⑤可靠性一定要高,使用寿命必须尽可能长,少维护甚至是不维护;⑥降低噪声和减小振动,改善舒适性。
目前,我国电动车电驱动系统仍以直流电机驱动为主,普遍采用从蓄电池到功率变换器再到驱动电机的单向能量传递方式,它存在着很多不足。具体而言,直流电机虽然具有结构简单、可控制性好、调速范围宽、起动转矩倍数较大、控制电路相对简单、成本较低等优点,但它的缺点同样不可忽视。有刷直流电机由于存在着机械换向部件电刷或换向器,很容易导致火花,噪声和震动严重,电磁干扰问题突出,而且电刷或换向器的维护比较困难,使用寿命较短,此外,电机的体积十分庞大,造成有限空间的浪费;无刷直流电机虽然克服了有刷电机的一些缺陷,但它的转子位置检测困难,整机价格颇高,性价比相对较低。再从系统效率角度来看,由于绝大多数系统采用单向功率传递,使得车辆在刹车减速或下坡滑行时白白地浪费了大量能量。此外,电刷、换向器等的机械震动、摩擦,也造成了系统效率的降低。因此,本文针对以上问题,结合电驱动系统的基本要求,提出一种新型的ZCZVS升压DC-DC双向变换器与变频器相结合来驱动鼠笼型异步电动机的节能型电动车交流驱动系统。
系统设计要求和总体设计
该系统主要作为电动摩托车等轻型电动车辆的驱动装置,其基本技术参数如下:输入电压为直流36V;直流变换器输出电压Vo为直流150V;驱动电机容量不大于300W;实现减速、刹车能量可回馈功能;实现加减速可调、软启动功能;具有过流、过压、欠压保护功能等。
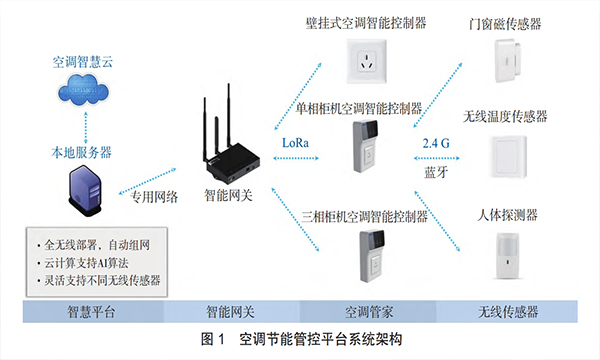
节能型电动车交流驱动系统的基本构成如图1所示,它包括蓄电池V5、ZCZVS升压DC-DC变换器、三相桥式逆变电路、交流异步电机和相应的控制、检测单元。高频电感L和电子开关Su构成升压DC-DC变换器,为由S1"S6构成的变频调速器的逆变器提供输入电压,电容Csu为缓冲电容,反并联二极管Dsu可以在能量回馈模式下进行续流;Sd为能量回馈控制开关,用于控制能量的流向和大小,电容Csd为缓冲电容,反并联二极管Dsd可以在电动运行模式下进行续流。当车辆处于刹车减速或下坡滑行时,交流电机端反电势将大于逆变器额定输入电压而处于发电状态,那么检测单元动作,它封锁了升压电路的电子开关Su,同时打开能量回馈开关Sd,系统的能量被反馈到电源侧。三相桥式逆变电路工作于VVVF模式下,当车辆根据需求要进行加、减速调节时,只需在给定的速度调节指令下,改变变频调速电路控制,即可实现速度的调节。另外,以鼠笼型异步电机作驱动电机,从结构上克服了直流电机存在的不足,减少了维护工作,提高了整机系统容量和转速,大大改善了可靠性和效率。
主要单元电路设计
1 开关管Su控制电路
根据要求,控制芯片需具有软启动、过流、欠压保护等功能,本系统选用Motorola公司的UC3842A,它是一种可以完成反馈电压比较、误差放大、过流保护、欠压保护等功能的电流跟踪型PWM控制集成电路。
开关管Su控制电路如图2所示。它的工作特性是:①最高电源电压Vcc=30V,内部有一个36V的稳压管可以有效防止高压窜入造成损坏;②欠压锁定功能,启动电压阈值为16V,关闭电压为10V,6V的启动、关闭差值可有效地防止电路在阈值电压附近工作时产生振荡;③自带一个稳定的5V参考电压,由引脚8输出供外部使用,输出电流为20mA;④输出高电平为13.5V(Vcc=15V,输出电流200mA时),低电平为1.5V(输入电流为200mA时);⑤高、低电平的上升、下降时间为100ns,电流采样信号(从引脚3输入)大于1V时,脉宽调制锁存器翻转,输出引脚6从高电平立即降至低电平,因此,改变电流采样电阻的大小,就可以改变过流保护动作的阈值。⑥电流跟踪特性:图2中流过开关管Su的电流增大时,采样电阻R21上的采样电压就增大,进入UC3842A引脚3的信号相应变大,此时经过3842A内部的调节电路调节,引脚6输出脉冲的占空比相应变小,使得DC-DC变换器输出电压降低,流经Su上的电流相应也变小,起到电流保护作用。
2 开关管Sd控制电路
在能量回馈时,开关管Sd处于工作状态,为了保证系统能量充分回馈,同时避免开关管Sd长时间承受大的回馈电流,采用555构成的频率为20kHz的“多谐振荡器+高频脉冲变压器”来驱动Sd。
“多谐振荡器+高频脉冲变压器”组成的驱动电路,其中由555构成的多谐振荡器的工作频率为f=1.43/(R18+2R22)/C19。在该电路中,检测与互锁电路控制着555集成块的引脚4。当引脚4为高电平时,即检测电路检测到系统应该进入能量回馈状态,多谐振荡器开始向Sd输出开关脉冲;当引脚4为低电平时,系统处于电动运行状态下,多谐振荡器不向Sd输出开关脉冲。
3 检测与互锁电路
在该系统中,检测与互锁电路具有异常重要的作用。首先,它通过检测DC-DC变换器输出端的电压大小,来判定是否需要将电路工作模式从电动运行状态转入能量回馈状态或者从能量回馈状态转入电动运行状态;其次,它需要根据检测及判断的结果,相应地控制电动运行开关管和能量回馈开关管的驱动电路。图4为检测及互锁电路,其工作原理如下:首先根据DC-DC变换器正常工作时输出电压的大小,设定比较器引脚2的参考电压,并采用电阻分压器来检测DC-DC变换器输出端的电压。当系统处于下坡减速或刹车制动时,电动机处于发电状态,那么机端反电势就大于DC-DC变换器的输出电压,也就是电阻分压器检测到的比较电压大于给定的参考电压,使得比较器翻转,引脚1输出为高电平,它迫使三极管Q1导通,将开关管Su的门极信号下拉到低电平;另外,同样由于分压器提供给UC3842A引脚2的电压超出芯片一内部的参考电压大小,它立即关断UC3842A向外的脉冲输出。这两者很安全地封锁了开关管Su。同时,比较器引脚1的高电平进入多谐振荡器的引脚4,开启了多谐振荡电路,使整个系统进入到能量回馈状态下。
用户名:密码:
首页| 论坛| 博客| Datasheet| 下载中心| EE大学堂| 专题 技术: 模拟 单片机 LED FPGA 半导体 电源 嵌入式 DSP 传感器 应用: 汽车电子 工控电子 家用电子 手机便携 安防电子 医疗电子 网络通信 测试测量
嵌入式
嵌入式处理器| 嵌入式操作系统| 开发相关| 总线与接口| 数据处理| 消费电子| 工业电子| 汽车电子| 其他技术| 存储技术| 综合资讯| 论坛| 电子百科| 嵌入式资源下载| 嵌入式习题与教程| 电子工程世界首页 >> 嵌入式>>汽车电子>>
4 主电路智能功率模块IPM
在本系统中,三相逆变电路具有非常重要的作用,它不仅为鼠笼异步电机提供电源电压,而且还要对电机进行变频调速控制。在以往,逆变电路主要采用6个分离的IGBT单元来搭建,需要对每个IGBT单元提供驱动电路、过热保护电路、过流保护电路,它们要和整个主回路的过压、短路保护电路及IGBT单元相匹配,使得变频逆变电路的设计具有相当的难度。然而随着智能功率模块(IPM)的出现,这种局面得到了巨大地改变,尤其近几年内,IPM正在逐步取代普通IGBT模块。
IPM模块是以IGBT芯片为主体,将芯片及其门极驱动、控制和过流、过压、过热、短路、欠压锁定等多种保护与故障检测电路集成于一体的高性能大功率器件,具有结构紧凑、体积较小、性能稳定、工作可靠、价格适中等优点。因此,结合电动车驱动装置的基本要求,本系统中选择三菱公司生产的IPM模块PS21255-E作逆变电路。
在PS21255-E模块中,下桥臂的三个管子的漏极在同一点上,该点通过一个小的电流检测电阻与系统的地相连,可直接用以系统地为参考点的+15V电源进行驱动控制,但是上桥臂三个管子的漏极不在地点,需要通过外部电路,在下桥臂管子导通时,下桥臂的+15V驱动电源同时给外部电容充电,当下桥臂断开后,电容两端保持+15V的电压降,且其低电势一端正好与上桥臂IGBT管的漏极相连,因此就实现了上桥臂IGBT管门极电压比漏极高的自举功能,很好地实现上桥臂管子的驱动。
5 系统加减速
本系统采用SA866AE/AM芯片的VMON和IMON两个引脚进行加减速控制,控制流程如图5所示。①如果VMON有效(即VMON≥0.5VDD),则加减速指令无效,该条件具有最高优先,它可防止过度减速时再生能量通过功率管而导致过电压。通常VMON<0.5VDD时,可以进行加减速调节。②如果IMON有效,无论UP、DOWN处于什么状态,瞬时频率都会被降低到预先设置的减速频率水平上,若在瞬时频率降到0时,IMON≥VDD,则PWM脉冲输出截止,此时不能进行任何加减速操作。该条件的优先权比VMON低,它可以防止加速过高导致过流过热损坏开关管。③当上述二者都无效时,运算法则将综合比较器的输出逻辑、DIR引脚控制和计数器信号,一起得出最后的调速控制。
SA866AE/AM的串行三线接口可与256位或1024位的串行EEPROM连接,如93C06或93C46。所有的参数存储在EEPROM中,复位以后通过串行接口自动下载。本系统拟采用93LC46进行参数存储,与SA866AE/AM的接口