

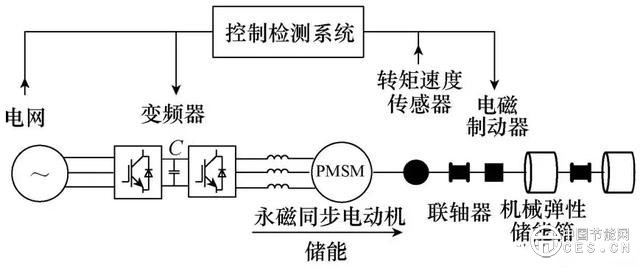
新能源电力系统国家重点实验室(华北电力大学)、国网河北省电力公司的研究人员郑晓明、米增强等,在2018年第24期《电工技术学报》上撰文指出(文章标题为“机械弹性储能参数辨识自适应调速控制”),机械弹性储能系统通过永磁同步电机驱动储能箱完成储能过程,储能箱由大型平面涡簧集成封装而成,运行特性复杂,需要一种强鲁棒性控制算法,确保系统安全高效运行。
针对此问题,设计带遗忘因子递推最小二乘(FFRLS)参数辨识的自适应反推控制算法并运用于机械弹性储能系统速度跟踪控制中。该方法通过构造特殊的Lyapunov函数,在永磁同步电机矢量控制模型上设计转矩转动惯量自适应反推控制算法,同时针对电机关键参数的变化问题,通过FFRLS参数辨识算法实时观测电机参数并反馈至控制系统,从而构成系统全参数鲁棒控制,保证系统高效储能。
仿真和实验结果表明,此控制方法适用于机械弹性储能特殊场合,能有效提高系统性能,对该储能系统进一步推广应用有积极的意义。
在资源和环境的压力下,传统能源发展受到限制,新能源技术在时代要求和政策支持下,迅猛发展。随着可再生能源在电力系统中的占比越来越大,储能技术随之逐步发展更新,先进储能技术已成为新能源发展的重要基础。不同的运用场景对储能装置需求不同,需要储能技术多元化发展,有自己的特点和优势。
机械弹性储能是一种比较新颖的储能方式,属于物理储能的范畴,其复杂的运行特性需要可靠的执行机构保证整个储能系统的安全高效。永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)以其结构紧凑、效率高、高转矩电流体积比等优点被选为机械弹性储能系统的执行机构。
机械弹性储能可用于恶劣环境下短时间大功率储发场合,比如:①地铁再生制动能量储发装置,地铁制动能回收再利用场合变化因素多,工况复杂,需储能控制系统有较强的自适应调节能力;②低温或高温环境下车辆的起动电源,此工况下PMSM参数会发生漂移;③抽油机能量回收再利用装置,抽油机常位于野外,而且负荷特性复杂,这种工况兼具①和②的特点。
上述应用场合均要求储能系统有较高的可靠性,结合该储能系统储能单元(机械弹性储能箱)固有的复杂运行特性,需要针对性地设计强鲁棒性控制算法,同时需要辨识PMSM参数实际值以便对控制变量进行修正,从而保证整个储能系统的安全高效。
反推控制是一种非线性反馈递推设计方法,易与各种不同的控制策略结合使用,通过反推控制器取代常规控制策略所采用的PI控制器,能在保留原控制策略优点的基础上进一步提高原控制策略的性能,选为本系统的控制算法。
PMSM的控制策略主要有直接转矩控制和矢量控制两种。直接转矩控制响应快,但存在起动时有冲击电流、转矩和磁链脉动较大、逆变器开关频率不恒定等问题。
文献[14]将反推控制算法和直接转矩控制策略相结合设计了一套控制方法,文献[15]在文献[14]基础上,根据系统需求增加了辨识算法,在辨识结果的基础上设计了辨识误差自适应直接转矩控制策略,一定程度地解决了所提控制问题,但是这种控制方法的推导异常复杂。
究其原因:一方面是控制系统建立在两相静止坐标系下,未完全解耦;另一方面是整个控制系统采用先辨识后控制的思想,辨识算法和控制算法采用两套不同的算法,加大了控制系统的复杂程度。矢量控制具有高精度、高动态性能等优点,而且其系统建立在两相旋转坐标系下,已完全解耦,系统表达简洁,这在结合反推控制算法针对机械弹性储能箱独有特点进行特殊设计时具有天然的优势。
已有研究将反推控制算法应用于id=0的PMSM矢量控制中,并有一些学者在此基础上作了一些改进,比如采用模糊算法来优化控制参数,结合Luenberger观测器设计无速度传感器PMSM反推控制算法,文献[20]通过扩展Kalman滤波(Extended Kalman Filter, EKF)观测器实现了PMSM无速度传感器强鲁棒控制,文献[21]通过预测函数和扩展状态观测器实现了PMSM精确伺服控制。
这些控制方法大都是在负载转矩恒定或存在阶跃性突变,同时负载转动惯量恒定的条件下设计完成。但机械弹性储能箱在运行时转矩和转动惯量同时连续变化,已有的控制方法并不适用。
本文结合反推控制算法和矢量控制策略提出了一种机械弹性储能参数辨识自适应调速控制方法。该方法的构建思路为:针对机械弹性储能箱特性,通过构造新颖的Lyapunov函数,设计转矩和转动惯量自适应反推控制算法;同时考虑到机组长时间运行时温度升高等引起的PMSM参数偏移问题,增加遗忘因子递推最小二乘(Forgetting Factor Recursive Least Squares, FFRLS)辨识算法实时在线更新PMSM参数,以保证控制系统有足够高的准确度,辨识算法和反推自适应控制算法相结合,便构成了系统全部关键参数强鲁棒性控制方法。
仿真分析和实验研究表明,本方法在系统运行时能保证转速的精确快速跟踪,同时能有效抑制PMSM参数变化带来的不利影响,适用于机械弹性储能场合。
有效提高机械弹性储能系统性能的控制方法
有效提高机械弹性储能系统性能的控制方法
结论
本文基于新颖的Lyapunov函数的设计,提出了一种基于反推控制的机械弹性储能转矩转动惯量自适应调速控制方法,同时考虑到PMSM参数变化给系统带来的不利影响,将FFRLS辨识算法引入到控制系统中以增加转速跟踪的精确性。
仿真和实验结果验证了所提方法适用于机械弹性储能系统,与基于PI矢量控制和反推矢量控制相比,本文所提方法有最快的收敛速度、最短的调整时间以及最少的脉动,同时能在PMSM参数变化时保持系统转速的精确控制,实现了系统全参数鲁棒控制,对于提高机械弹性储能系统性能有一定的意义。




